実績例
お客様から公開のお許しをいただいた事例などいくつか掲載いたします。
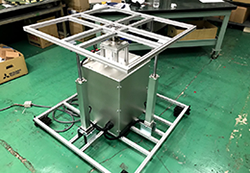
2018年 電動2軸動揺吸収テーブル 試作(電動システム)
- ユーザー
- MARINE TECHNICAL & INDUSTRIES CO., LTD.(台湾)
- ご要望
- トロール船は水揚げ中に大きく傾くが、船内のテーブルは傾かないようにしたい。水揚げ中に使用。
- 傾斜角度は13度程度。波の周期は7秒程度。
- テーブルへの荷重は10kgを想定
- 製作
- 前後左右傾斜の2軸で中央に支柱を設置
- 電動シリンダーを使用
- X-Yの2軸ジャイロセンサを使用
- サイズは1000x1057x高さ913mm 35kg
- 傾斜角度は2軸とも±25°
- ポイント
- 電動サーボ PLC ジャイロセンサ 動揺吸収
2016年 電動6軸モーションベース (電動システム)

- ユーザー
- WONDER VISON TECHNO LABORATORY株式会社様
- ご要望
- 開発した球面投影機でVR体験するための可動座席
- 事前に手入力で動きをデータ保存でき、再生可能
- 製作
- 6軸モーションベースは電動部一体型 9kVA
- ヒーブ±150mm 最大速さ300mm/sec
- 当社は電動モーションベースのみ納入で、お客様にて座席など構造物を取り付けた(2人乗り)
- 制御はノートパソコンからEtherケーブルを通して行う
- 手動入力のため本体と同じ構造の卓上に置く教示装置を用意
- 動きのデータは動画に合わせ、教示装置を使って本体を動かすことで動揺データを作成・記録
米国のSXSW2017に出展され、現地だけでなく日本のネットニュースでも話題になった
- ポイント
- 6DoF 電動サーボ PLC
2015年 4腕極限作業ロボット・オクトパス(油圧システム)
- ユーザー
- 菊池製作所株式会社様
- ご要望
- パワーを得るために油圧を使いたい
- 電動モータを回し、油圧ポンプの動力を使う
- 4つの腕を動かしたい
- ロボット本体はできるだけ小型にしたい
- 操縦系は大学との共同研究で行うので不要
- 製作
- 外部電源(三相200V) モータ出力は3.7kW
- パワーショベル同様の腕を4つ配置
- 腕のシリンダと走行用油圧モータの油圧供給には、一体性のあるカートリッジバルブ(電磁比例弁)を採用し省スペース化
- バルブ制御信号は菊池製作所様の遠隔操縦装置からRS-485(マルチドロップ)を使いデイジーチェーン結線
- 比例弁用ドライバ(12VDC)は基板1枚バルブ5chとし、10枚を本体に内蔵
2016年春の菊池製作所様成果発表会にて公開
国内のマスコミ各社に福島のロボット産業のひとつとして話題になった
- ポイント
- ロボット 比例弁アンプ デジタル通信
2014年 動揺吸収型可動式桟橋 試作機(油圧システム)

- ユーザー
- 東亜建設工業株式会社様
- ご要望
- 船舶から陸上などへ安全に移動できるよう船舶の揺れを吸収する洗浄桟橋を作りたい
- 検証のため、波高50cmの揺れを吸収する試作機を作る
- 製作
- 駆動油圧ユニット
- 15kW、圧力7MPa、最大吐出量105L/min
- 制御装置は波形制御用と角度監視用の2台を製作
- 桟橋の土台には6軸モーションベースを採用
- ヒーブ±600mm、最大速さ400mm/sec
センサは東亜建設様にて加速度センサとジャイロセンサをご準備いただき、船舶の揺れをリアルタイムに制御装置に伝え、6軸モーションベースでは船の揺れを反転して揺れを低減
実際に北九州の洋上で実証試験を行い、人が乗っても揺れを感じないことが確認できました
- ポイント
- 6DoF 油圧サーボ PLC 動揺吸収
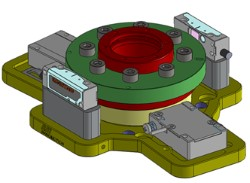
2013年 放射光施設の分析用回転ステージ(超音波モータ)
- ユーザー
- 理化学研究所 放射光科学総合研究センター様
- ご要望
- SPring-8で使用する回転ステージ
- 10-6Paの真空度で使え、磁場を発生させないこと
- 粗動では1パルスで約0.1μrad駆動する
- 微動では0.8nm/V相当(アクチュエータ部)で駆動する
- アクチュエータは停止・保持で発熱しない
- 製作
- Nanomotion社にて超音波モータと回転ステージを設計・製作。
サイズはW110×L160×H50mm、φ60ステージ
超音波モータは高真空10-6Pa仕様、非磁性タイプ(チタン)
1パルスで0.1μrad駆動
制御にはNanomotion社の超音波モータに適した米国GALIL社のモーションコントローラを使用
納入後、理研公式サイトにある「SACLAを支える日本の力」に弊社社名が掲載されました
- ポイント
- 超音波モータ 真空 非磁性 モーションコントローラ


